要CPLD器件的结构特点和编程下载电缆的制作,然后给出了步进伺服控制系统中插补运算的电路设计,最后说明了插补运算的仿真结果。该设计方法大大提高了系统的性能,同时还使设计具有了自主知识产权。
CPLD;步进伺服;插补运算
CPLD来实现插补运算的方法。随着技术和的发展,基于实现插补运算不仅可以提高插补速度,减轻主的运算负担,而且能够大大提高插补运算的可靠性。
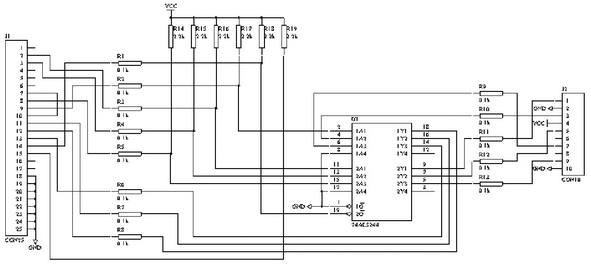
1 ByteBlasterMV编程下载电缆
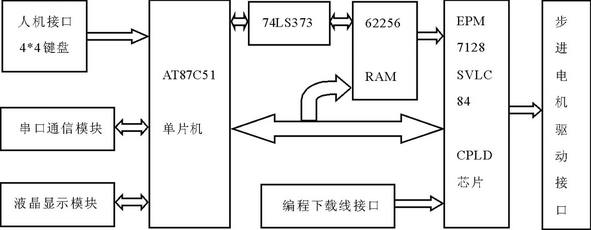
2步进伺服控制系统的硬件结构图
CPLD芯片进行算法程序和数据的在系统下载和调试,为此制作了方式的编程下载电缆。该下载方式是通过计算机的打印机并行端口进行程序和数据的下载编程和调试。图给出了方式编程下载电缆用于进行数据转换的原理图,其中为与系统电路板上器件编程下载接口相连的针插座,为与计算机的打印机并行端口相连的针插座,采用器件对从计算机并行端口接受的编程数据进行转换,转换后的数据连接到芯片的编程下载接口,从而完成对芯片的编程和调试。
2给出了步进伺服控制系统的硬件结构图。本系统由系列单片机
RS-485总线与单片机系统的隔离,在
单片机上电复位时使的使能信号为。为达到这一目的,将单片机的复位信号引入光电耦合器进行信号变换,以保证单片机上电复位时光电耦合器输出为,并将光电耦合器的输出信号送给的端。由于工业控制领域的工程环境比较恶劣,现场通常存在各种形式的干扰源,所以在电路设计中采用稳压管1、2组成的吸收回路,在总线的传输端增加保护措施,从而防止线路上的干扰。
,因为芯片执行插补运算所产生的进给指令脉冲,其电流幅度不能满足混合式步进电机驱动器的要求,所以还在和电机驱动器接口之间采用光电隔离器和具有输出特性的门电路。具有强大的驱动放大能力,它接受的输入信号最大电流为,通过输出放大,能够输出最小电流为的信号。
EPM7128SVLC84芯片内部没有振荡电路,本设计将单片机的时钟由其输出端引出,然后通过逻辑门进行整形滤波后为芯片提供全局时钟信号。
VHDL语言实现该算法,实体部分定义、和直线终点坐标,为全局输入信号,定义、、和为全局输出信号。全局输入信号都是由电路系统中其他的各个模块提供的控制信号,全局输出信号分别是轴正负向进给脉冲、轴正负向进给脉冲,分别控制步进电机向不同方向进给。在实体的结构体中设定记录执行每一步直线插补运算后产生的偏差值,设定,为插步运算过程中刀具的加工点坐标,它们在结构体中被定义成变量的形式。是用于对算法初始化的复位信号,插补运算启动后,首先令‘’时对偏差值和加工点坐标和清零,从而使刀具回到坐标原点。是插补运算的时钟控制信号,只有当上升沿到来时才进行插补运算的处理。在插补运算过程中,首先根据终点坐标判定直线所在的象限,然后按照具体的象限执行插补运算,产生控制步进电机运动的进给脉冲。对于第一象限内的直线执行插补运算,当刀具在直线上时,满足××。如果≥,那么当前加工点,在目标直线上或在直线的上方,则向轴正向产生一进给脉冲,该脉冲信号通过步进电机驱动器驱动步进电机,使刀具向正向进给一个步进角,新加工点的偏差为;如果,那么当前加工点,在目标直线的下方,则刀具向轴正向进给一个步进角,新加工点的偏差为。该过程循环往复执行,直到加工点到达目标直线的终点时退出循环,完成直线插补运算过程。对于其他象限的直线插补算法,可通过相似的方法完成算法的程序设计。
VHDL语言实现该算法,其设计原理与第一象限直线插补运算类似,只是在偏差判别时所采用的判别方程为××××。对于其他象限的圆弧插补算法,方法类似。
CPLD芯片进行编程、仿真,程序和数据下载及测试验证,本文完成了基于芯片设计实现步进伺服系统的插补运算。同时,在插补运算的速度、精度和可靠性上都有了很大的提高。